Продолжение эксперимента по разработке корпуса для материнской платы от ноутбука.
В данной части рассмотрена попытка из частично сломанного ноутбука сделать мини ПК.
Продолжение эксперимента по разработке корпуса для материнской платы от ноутбука.
В данной части рассмотрена попытка из частично сломанного ноутбука сделать мини ПК.

Моделирование твердых поверхностей (hard surface modeling) — это техника 3D-моделирования, используемая для создания объектов с твердыми и статичными поверхностями, таких как оружие, транспортные средства, здания и другие неодушевленные предметы. Эта техника, делающая упор на точную геометрию и внимание к деталям, становится все более популярной в мире компьютерной графики.
Поэтому сегодня в этой статье мы расскажем вам о моделировании твердых поверхностей все, включая его применение, техники, бесплатные ресурсы для изучения и различия между моделированием органических и твердых поверхностей. Будь то создание реалистичных автомобилей или футуристического оружия — освоение современных техник моделирования твердых поверхностей обязательно поднимет ваши навыки на новый уровень.

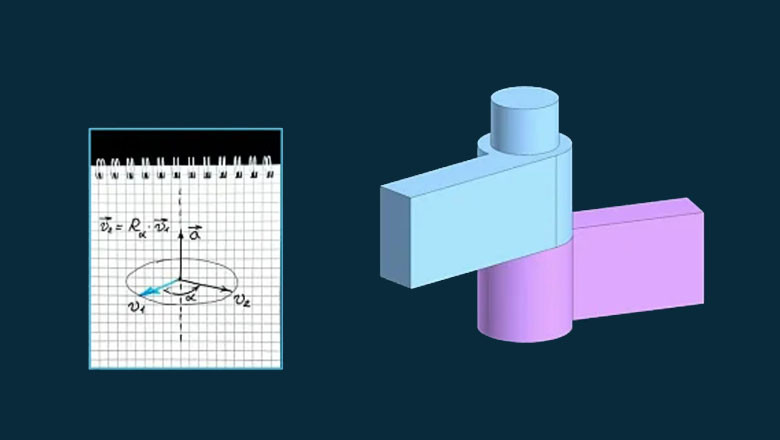
Ambient Occlusion (затенение от рассеянного освещения) можно не вычислять в шейдере SSAO, а запечь в текстуру, увеличив fps. Конечно, можно воспользоваться 3D пакетом для запекания, например Blender. Но ведь мы на Хабре. И если вам хочется погрузиться во внутренности данного процесса, в этой статье описан способ вычисления Ambient Occlusion на основе матрицы, преобразующей направление в расстояние.

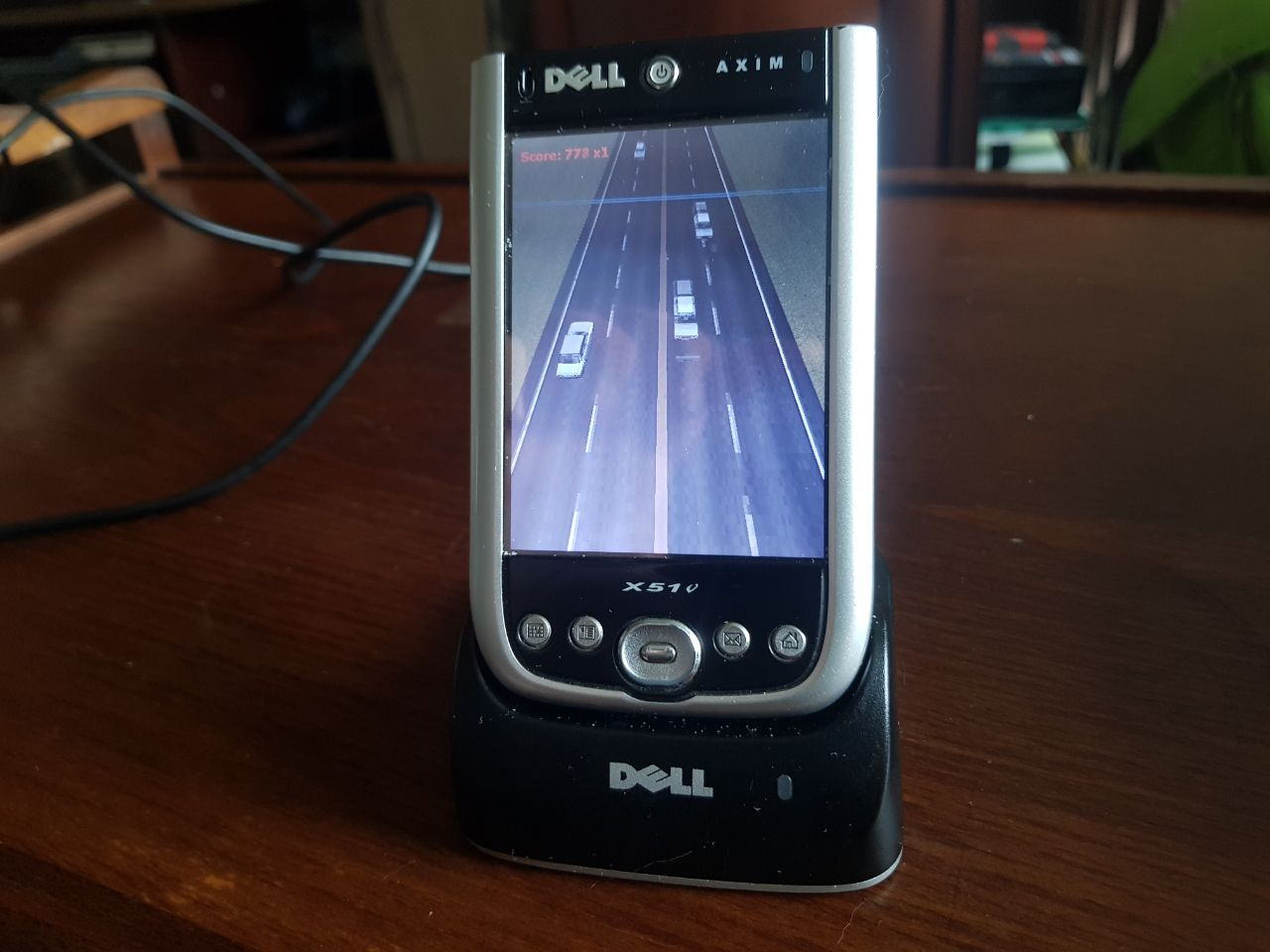
Более 10 лет назад в голове промелькнула мысль "если из ноутбука убрать все лишнее то получится компактный системный блок". Даже набросал "бизнес-идею" в виде презентации...

Современные томографы позволяют получать высокоточные трехмерные изображения внутренней структуры большого размера, предоставляя ценную информацию о геометрии, составе и дефектах исследуемых образцов. Размеры одной реконструкции обычно колеблются от 512 мегабайт до 1 терабайта. Для анализа таких данных используются специализированные инструменты, но традиционная визуализация трёхмерного объема реконструкции до сих пор является важным этапам оценки качества реконструкции и её интерпретации специалистом.
В сегодняшней статье мы расскажем, как нам удалось обойти все трудности и сделать визуализатор, работающий в режиме реального времени. Одна из важных задач визуализатора, созданного командой Smart Engines, - отображение процесса реконструкции, которая тоже потребовала креативного подхода, так как все вычислители нагружены выполнением другой вычислительно затратной задачи - выполнением реконструкции, а самих данных для отображения еще частично нет.

Александр Спиваков, руководитель команды разработки C3D Converter, C3D Labs, описывает роль конвертера в качестве части C3D Toolkit, представляет сценарии использования C3D Converter — миграция и MultiCAD — в пользовательских приложениях, знакомит с доработками решения, сделанными в контексте этих задач, и планами развития конвертера.
Что собой представляет C3D Converter в составе C3D Toolkit и зачем он нужен? Глобально перед нами стоят две задачи.
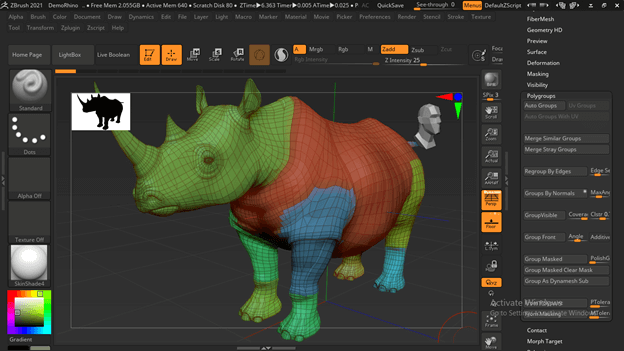
Полигруппы (Polygroups) в Zbrush представляют из себя способ разделения уже существующей 3D-модели на группы полигонов с целью выполнения над ними различных видов работ. При создании каждой из этих групп полигонов ей назначается свой уникальный цвет, что помогает нам визуально различать их. Мы можем добавить секционирование на полигруппы в любую модель, просто включив в Zbrush опцию PolygFrame. Кроме того, они позволяют сделать процесс работы над моделью более гладким, так как мы можем скрыть или убрать ненужные в данный момент секции полигрупп с помощью простого сочетания клавиш.
В этой статье я хочу показать вам несколько разных аспектов полигрупп, так что мы сразу перейдем к практике.
Приветствую всех!
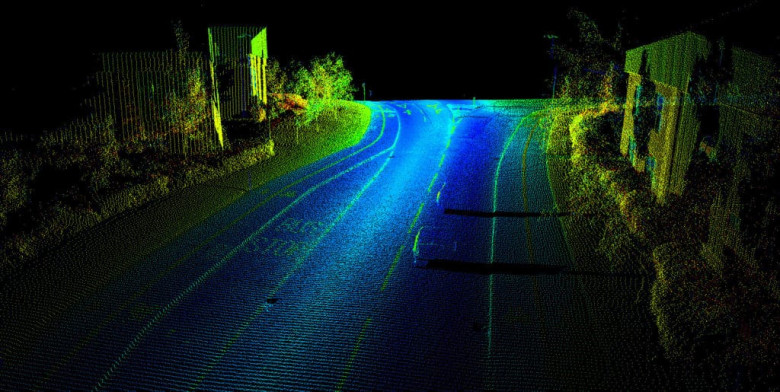
В этой публикации я попробую максимально просто и наглядно рассказать о сверточном слое для point cloud. Перед вами статья, объясняющая KPConv — метода работы с облаками точек без их преобразования в промежуточные форматы, такие как воксели. Моя недавняя задача, связанная с совмещением облаков точек, заставила обратиться к нейронным сетям из за разной плотности точек в местах пересечений. И вот, исследуя возможные подходы, я обнаружил решение в котором использовали KPConv, который позволил извлекать признаки из точек по аналогии извлечений признаков из пикселей.
Информации на русском языке о данной структуре очень мало, поэтому я постарался сделать материал доступным и содержательным.

Салют, Хабр! На связи Игорь Пасечник — технический лид направления XR RnD SberDevices. Сегодня я хочу рассказать про одно из наших направлений исследований — разработку генеративных моделей для 3D-контента.
Современные методы генерации 2D-контента, такие, как 2D-диффузионные модели (Kandinsky 3.0, SDXL), уже достигли впечатляющих результатов и несколько лет являются неотъемлемой частью современности, генеративные видео модели также активно развиваются. Кульминацией развития таких подходов, вероятно, станет представленная не так давно модель Sora. Тем не менее большинство из этих моделей до сих пор испытывают проблемы при генерации консистентных 3D-сцен и объектов.
С другой стороны стороны, существует конвенциональная 3D-графика, а также огромная индустрия и множество прикладных областей, включая игры, XR, дизайн, архитектуру, маркетинг, 3D-проектирование, где используются пайплайны на основе 3D-графики и производится контент на их основе. Методы создания 3D-моделей, такие, как ручное моделирование, 3D-сканирование и фотограмметрия, могут быть трудоёмкими, дорогостоящими и требующими специальных навыков. 3D-продакшн в общем виде использует множество инструментов для создания и рендеринга тяжелой фотореалистичной графики, адаптация генеративных 3D-пайплайнов под такие подходы достаточно тяжела из-за множества инструментов, которые такие пайплайны должны поддерживать. Также адаптация больших латентных генеративных 2D-моделей вроде SORA для прикладных задач фотореалистичной графики может стать альтернативой классическми пайплайнам на основе физического моделирования. Тем не менее, на текущий момент пайплайны работы с графикой, использующие базовый набор примитивов, включая меши, PBR-текстуры, простые модели освещения, закрывают множество прикладных задач и также могут быть востребованы у массового пользователя в случае их демократизации.


За последний год мы добавили много нового на Яндекс Карты: например, высокодетализированные дороги с подробной разметкой, растительность, а ещё совершенно новые, цветные и детальные 3D-модели достопримечательностей. Их можно увидеть, приблизив, например, Пушкинский музей, главное здание МГУ, Казанский собор и другие известные места во многих городах России и мира.
Привет, меня зовут Миша, я старший дизайнер продукта в Яндекс Картах. В этой статье я расскажу об особенностях запуска 3D-моделей достопримечательностей на Картах, о том, как они помогают пользователям, и, конечно, о тонкостях процесса дизайна и производства.
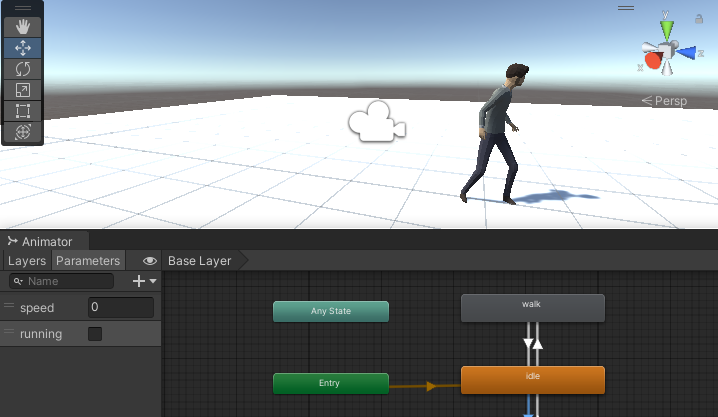
В этой статье продолжим делать управление 3d-персонажем в среде Unity. В прошлый раз мы остановились на портировании анимаций, они добавились без материалов (текстур). Чтобы отобразить текстуры из исходной blender-модели, кликнем на одну из анимаций, например, idle.fbx, в правом окне выберем вкладку Materials. В комбобоксе Material Creation Mode выберем Standard (Legacy), Location - Use External Materials (Legacy), остальные поля оставим неизменными, нажмем кнопку Apply. Теперь наша анимация отображает исходный skin модели.
Александр Алахвердянц, ведущий математик-программист, C3D Labs, знакомит с новинками в двухмерных и трехмерных решателях — продуктах, которые разрабатываются в группе C3D Solver.
Что такое решатели? Решатели — это библиотеки, которые позволяют накладывать связи на геометрические объекты. Эти связи мы называем ограничениями. Они бывают двух видов: логические (касания, симметрии, совпадения) и размерные (угловой и линейный размеры, паттерны). Кроме того, мы предоставляем функционал анализа степеней свободы, минималистичного драггинга и логирования вызовов API. Логирование вызовов API значительно помогает при составлении баг-репортов.
Первая и главная новинка группы C3D Solver в этом году — это появление нового типа объектов, а именно двумерных паттернов.












Первая часть анимирования 3d-персонажа в Unity3d. В статье скачаем 3d-модель персонажа, скачаем скелетные анимации и импортируем их в проект unity.
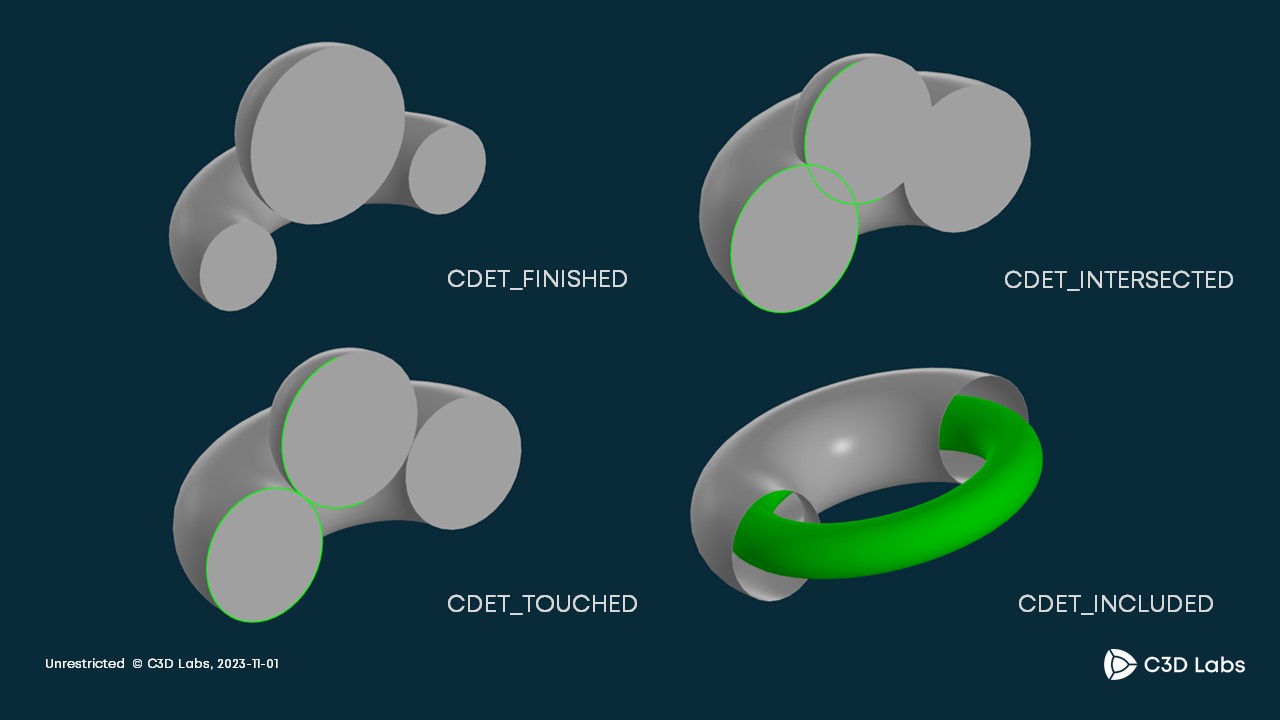
Сергей Белёв, старший математик‑программист, C3D Labs, знакомит с новым компонентом C3D Toolkit — модулем C3D Collision Detection, рассказывает о том, что детектор столкновений представляет собой изнутри, и о том, какие возможности он предоставляет пользователям.
Детектор столкновений — новый компонент инструмента C3D Toolkit. В статье перечислим математические задачи, которые поставлены перед детектором, узнаем его основной функционал, рассмотрим несложный пример, демонстрирующий интерфейс модуля, и обратимся к планам и дорожной карте.
Обнаружение столкновений подразумевает постановку следующих математических задач. Первая — это возможность уметь находить пересечения между собой среди множества объектов и делать это быстро, без поиска самого пересечения. Требуется оперативно отвечать на соответствующий вопрос — «да, пересекаются» / «нет, не пересекаются». Следующая задача состоит в классификации касаний между собой этого множества объектов. Каждое касание является пересечением, но не наоборот, и важно уметь выделять этот частный случай пересечения. Помимо этого, актуальна задача поиска минимального расстояния между сборками тел и телами, а также задача классификации взаимного расположения объектов. Примером служит детектирование «вложения тел» («тело в теле»), недавно внедренное нами в ответ на многочисленные запросы пользователей. Важно отметить, что все эти задачи нужно уметь решать как в статике, так и в динамике.
Модуль C3D Collision Detection, во‑первых, реализует «эффективные» алгоритмы решения всех поставленных задач — как в статических сценах, например контроль зазоров, так и в динамических сценах, в частности контроль соударений между элементами сборки. Во‑вторых, у нас есть возможность тонкой настройки всех формулируемых задач — можно даже создавать их комбинации. В‑третьих, исходя из необходимости быстро детектировать касание/пересечение, применяется принципиально иной подход, чем в булевой операции: мы не строим какие‑либо дополнительные объекты.


Мир, в котором мы с вами живём и который непосредственно ощущаем, является объёмным: расположение любой точки в нём можно описать тремя координатами, и этот факт элементарно зашит в нашу природу. Чем больше “понимания” система искусственного интеллекта будет иметь относительно истинной сущности вещей, включая их расположение, форму и объем, тем легче она будет справляться с задачами, которые до сих пор мог выполнять только человек.
В этой статье разберём, как ИИ помогает решать одну из ключевых задач робототехники, а именно - понимание и ориентация в объёмных пространствах!
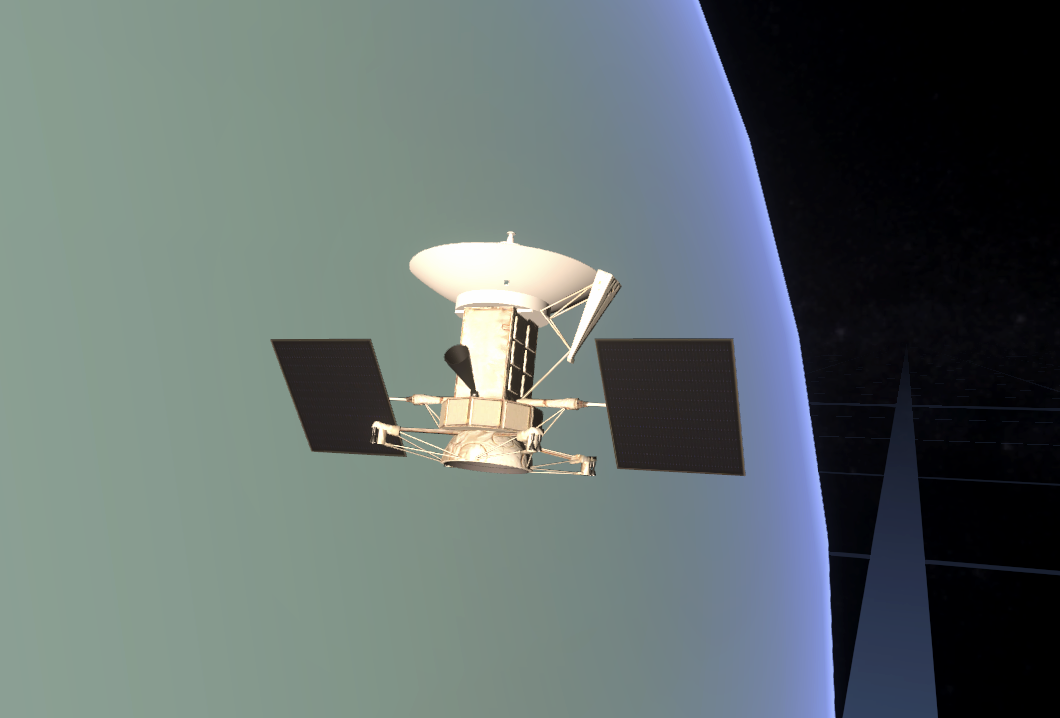
Несколько лет назад я работал над проектом по реализации на Unity реалистичного космического симулятора. Это достаточно нестандартное применение движка, и в ходе работы были решены разные специфические задачи, одна из которых - обеспечение корректного рендеринга объектов космических масштабов. Этим опытом я бы хотел поделиться с сообществом.